
ROS2 Foxyのインストールメモ。
環 境
- Ubuntu 20.04 (64bit x86)
参考サイト
- 以下のサイトに従ってインストールした。
準 備
- ROS2をインストールするためのサイト(リポジトリ)を追加
- GPG公開鍵を利用するための設定
$ sudo apt update$ sudo apt install curl gnupg2 lsb-release$ sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
- 次のようなエラーが出た場合
- エラー:4 http://packages.ros.org/ros2/ubuntu focal InRelease
公開鍵を利用できないため、以下の署名は検証できませんでした: NO_PUBKEY F42ED6FBAB17C654 - 次のコマンドで解決する。なお、以下のキー番号は上のNO_PUBKEYと同じにする。
- sudo apt-key adv –keyserver keyserver.ubuntu.com –recv-keys F42ED6FBAB17C654
- エラー:4 http://packages.ros.org/ros2/ubuntu focal InRelease
- リポジトリの追加
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
- GPG公開鍵を利用するための設定
ROS2 のインストール
- リポジトリを更新したのでアップデートする。
$ sudo apt update
- インストールする。
$ sudo apt install ros-foxy-desktop
環境設定
- 設定スクリプトの反映
$ source /opt/ros/foxy/setup.bash
- コマンド作業で便利なツールのインストール
$ sudo apt install -y python3-argcomplete
テスト
- ROS2がうまくインストールされたか、デモプログラムで確認する。まず、端末を2つ開く。
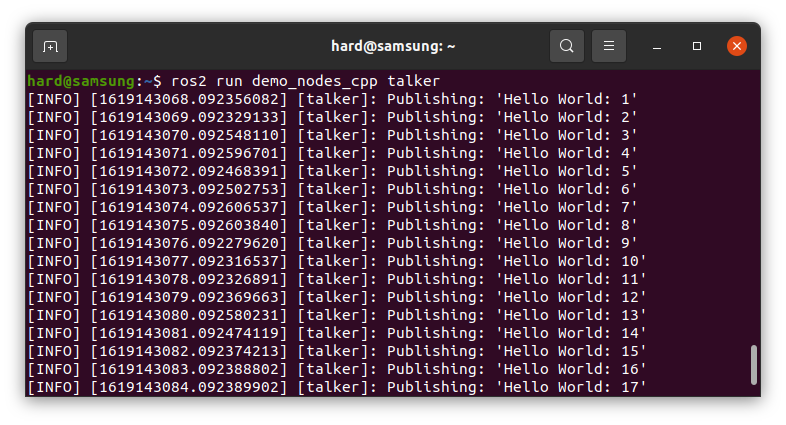
- 1番目の端末で設定スクリプトを反映して、C++で作成されたtalkerプログラムを実行する。
$ source /opt/ros/foxy/setup.bash$ ros2 run demo_nodes_cpp talker
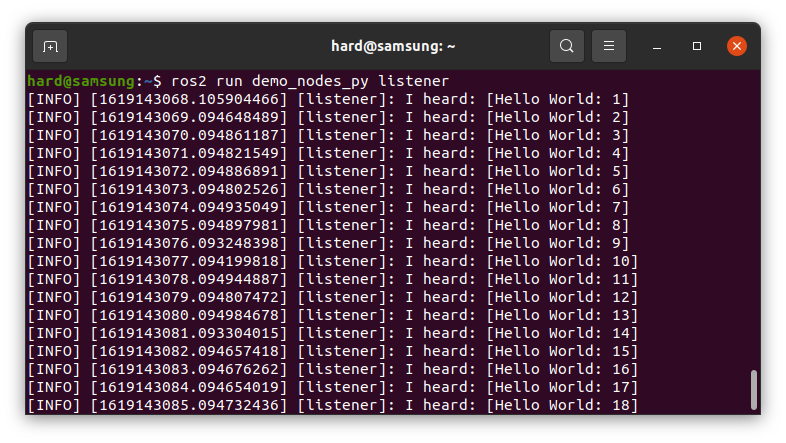
- 2番目の端末で設定スクリプトを反映して、Pythonで作成されたlistenerスクリプトを実行する。てうまくROS2がインストールされたか確認する。
$ source /opt/ros/foxy/setup.bash$ ros2 run demo_nodes_py listener
- うまく実行されると、下図のようにtalkerが送信した情報をlisterが受信して端末に表示される。
終わり