このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第11週はWebotsの自動運転シミュレータにウェイポイントナビゲーションとデッドレコニングを実装します.
レファレンス
ハンズオン
- 次の記事に従って順番にハンズオンを進めてください.プチプロジェクトがファイナルプロジェクトの中間マイルストーンになります.
終わり
このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第11週はWebotsの自動運転シミュレータにウェイポイントナビゲーションとデッドレコニングを実装します.
レファレンス
ハンズオン
終わり
Webots入門講座の5回目です.引き続きWebotsの自動運転シミュレータを使っていきます.Webotsにはロボットを動作させるコントローラの他に,スーパバイザ(Supervisor)コントローラがあります.スーパーバイザは管理者という意味で,ロボットではなく人間が行う作業に相当することは,このスーパーバイザ・コントローラで実現できます.例えば,ロボットの真の位置や速度を取得したり,初期位置に戻すなどの作業です.スーパーバイザ・コントローラを使いロボットカーの真の自己位置を取得する方法とシミュレーションを再実行する方法を学びましょう.
レファレンス
API
真の自己位置の取得方法
''' supervisor_robot_car.py '''
from controller import Supervisor # コントローラモジュールからスーパーバイザクラスをインポート
from vehicle import Driver # vehcleモジュールからDriverクラスのインポート
from math import sqrt # mathモジュールからsqrtクラスをインポート
import sys # sysモジュールをインポート
TIME_STEP = 10
supervisor = Supervisor() # スーパーバイザクラスからインスタンスを生成
# 以下の処理はシミュレーションループの前に一度だけ呼び出す
robot_node = supervisor.getFromDef("MyRobotCar")
if robot_node is None:
sys.stderr.write("The node is not found in the current world file\n")
sys.exit(1)
trans_field = robot_node.getField("translation") # translationフィールドを取得
rot_field = robot_node.getField("rotation") # rotationフィールドを取得
t0 = supervisor.getTime() # 時刻の取得
init_pos = trans_field.getSFVec3f() # translationフィールドから位置を取得
init_rot = rot_field.getSFRotation() # rotationフィールドから姿勢を取得
print("init_pos=", init_pos)
print("init_rot=", init_rot)
print("*** Start the supervisor controller ***")
# シミュレーションループ
while supervisor.step(TIME_STEP) != -1:
t = supervisor.getTime() - t0
if t >= 15: # 15経過後
print("*** Reset the simulation ***")
supervisor.simulationReset()
robot_node.restartController()
t0 = supervisor.getTime()
values = trans_field.getSFVec3f() # translationフィールドから値(位置)を取得
print("%f[s] Real position:(%g, %g, %g)[m]" % (t, values[0], values[1], values[2]))
ハンズオン

終わり

Webots入門講座の6回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はカメラセンサの使い方とそれを使った簡単な自動運転を実現します.コースの中央にある黄色ラインを追従するサンプルプログラムを紹介します.また,プログラムが前回より長くなってくるのでクラス化します.
レファレンス
カメラの使い方
API
サンプルコード
"""robot_car_auto controller"""
import cv2
import numpy as np
from vehicle import Driver
from controller import GPS, Node
""" ロボットカークラス """
class RobotCar():
SPEED = 20 # 巡行速度[km/h]
UNKNOWN = 99999.99 # 黄色ラインを検出できない時の値
TIME_STEP = 60 # センサのサンプリング時間[ms]
""" コンストラクタ """
def __init__(self):
# Welcome message
self.welcomeMessage()
# Driver
self.driver = Driver()
self.driver.setSteeringAngle(0)
self.driver.setCruisingSpeed(self.SPEED)
# GPS
self.gps = self.driver.getDevice("gps")
self.gps.enable(self.TIME_STEP)
# Camera
self.camera = self.driver.getDevice("camera")
self.camera.enable(self.TIME_STEP)
self.camera_width = self.camera.getWidth()
self.camera_height = self.camera.getHeight()
self.camera_fov = self.camera.getFov()
print("camera: width=%d height=%d fov=%g" % \
(self.camera_width, self.camera_height, self.camera_fov))
# Display
self.display = self.driver.getDevice("display")
self.display.attachCamera(self.camera) # show camera image
self.display.setColor(0xFF0000)
""" ウエルカムメッセージ """
def welcomeMessage(self):
print("*********************************************")
print("* Welcome to a simple robot car program *")
print("*********************************************")
""" 移動平均フィルタを実装しよう."""
def maFilter(self, new_value):
"""
ここに移動平均フィルタのコードを書く
"""
return new_value
""" ステアリングの制御: wheel_angleが正だと右折,負だと左折 """
def control(self, steering_angle):
LIMIT_ANGLE = 0.5 # ステアリング角の限界 [rad]
if steering_angle > LIMIT_ANGLE:
steering_angle = LIMIT_ANGLE
elif steering_angle < -LIMIT_ANGLE:
steering_angle = -LIMIT_ANGLE
self.driver.setSteeringAngle(steering_angle)
""" 画素と黄色の差の平均を計算 """
def colorDiff(self, pixel, yellow):
d, diff = 0, 0
for i in range (0,3):
d = abs(pixel[i] - yellow[i])
diff += d
return diff/3
""" 黄色ラインを追従するための操舵角の計算 """
def calcSteeringAngle(self,image):
YELLOW = [95, 187, 203] # 黄色の値 (BGR フォーマット)
sumx = 0 # 黄色ピクセルのX座標の和
pixel_count = 0 # 黄色の総ピクセル数
for y in range(int(1.0*self.camera_height/3.0),self.camera_height):
for x in range(0,self.camera_width):
if self.colorDiff(image[y,x], YELLOW) < 30: # 黄色の範囲
sumx += x # 黄色ピクセルのx座標の和
pixel_count += 1 # 黄色ピクセル数の和
# 黄色ピクセルを検出できない時は no pixels was detected...
if pixel_count == 0:
return self.UNKNOWN
else:
y_ave = float(sumx) /(pixel_count * self.camera_width)
steer_angle = (y_ave - 0.5) * self.camera_fov
# print("dev=%g y_ave=%g sumx=%d pixel_count=%d" % (dev, y_ave, sumx, pixel_count))
return steer_angle
""" 実行 """
def run(self):
step = -1
while self.driver.step() != -1:
step +=1
BASIC_TIME_STEP = 10 # シミュレーションの更新は10[ms]
# センサの更新をTIME_STEP[ms]にする.この例では60[ms]
if step % int(self.TIME_STEP / BASIC_TIME_STEP) == 0:
# GPS
values = self.gps.getValues()
# Camera
camera_image = self.camera.getImage()
# OpenCVのPythonは画像をnumpy配列で扱うので変換する.
cv_image = np.frombuffer(camera_image, np.uint8).reshape((self.camera_height, self.camera_width, 4))
# 操作量(ステアリング角度)の計算
steering_angle = self.maFilter(self.calcSteeringAngle(cv_image))
if steering_angle != self.UNKNOWN:
print("%d:Find the yellow line" % step)
self.driver.setCruisingSpeed(self.SPEED) # 走行速度の設定
self.control(steering_angle) # ステアリングの制御(比例制御の簡易版)
else:
print("%d:Lost the yellow line" % step)
self.driver.setCruisingSpeed(0) # 追従する黄色線をロストしたので停止する.
""" メイン関数 """
def main():
robot_car = RobotCar()
robot_car.run()
""" このスクリプトをモジュールとして使うための表記 """
if __name__ == '__main__':
main()
ハンズオン
なお,サンプルを実行すると路上に置いてあるドラム缶に衝突します.これを避けるためのLIDARセンサの使い方は次回のWebots入門講座で学びます.お楽しみに!
終わり

この記事はWIP(Work in Progress)です.サンプルコードの説明をほとんどしていないので,時間を見つけて加筆します.
Webots入門講座の7回目です.引き続きWebotsの自動運転シミュレータを使っていきます.今回はLIDAR(Laser Detection and Ranging)センサの使い方とそれを使った簡単な障害物回避を実現します.
レファレンス
LIDARの使い方
API
サンプルコード
"""robot_car_lidar.py
Webots/projects/vehicle/controllers/autonomous_vehile/autnomous_vehicle.cを参考にしています.
"""
import cv2
import math
import numpy as np
from vehicle import Driver
from controller import GPS, Node
""" ロボットカークラス """
class RobotCar():
SPEED = 20 # 巡行速度
UNKNOWN = 99999.99 # 黄色ラインを検出できない時の値
FILTER_SIZE = 3 # 黄色ライン用のフィルタ
TIME_STEP = 30 # センサのサンプリング時間[ms]
CAR_WIDTH = 2.015 # 車幅[m]
CAR_LENGTH = 5.0 # 車長[m]
""" コンストラクタ """
def __init__(self):
# Welcome message
self.welcomeMessage()
# Driver
self.driver = Driver()
self.driver.setSteeringAngle(0)
self.driver.setCruisingSpeed(self.SPEED)
self.driver.setDippedBeams(True) # ヘッドライト転倒
# LIDAR (SICK LMS 291)
self.lidar = self.driver.getDevice("Sick LMS 291")
self.lidar.enable(self.TIME_STEP)
self.lidar_width = self.lidar.getHorizontalResolution()
self.lidar_range = self.lidar.getMaxRange()
self.lidar_fov = self.lidar.getFov();
# GPS
self.gps = self.driver.getDevice("gps")
self.gps.enable(self.TIME_STEP)
# Camera
self.camera = self.driver.getDevice("camera")
self.camera.enable(self.TIME_STEP)
self.camera_width = self.camera.getWidth()
self.camera_height = self.camera.getHeight()
self.camera_fov = self.camera.getFov()
print("camera: width=%d height=%d fov=%g" % \
(self.camera_width, self.camera_height, self.camera_fov))
# Display
self.display = self.driver.getDevice("display")
self.display.attachCamera(self.camera) # show camera image
self.display.setColor(0xFF0000)
""" ウエルカムメッセージ """
def welcomeMessage(self):
print("*********************************************")
print("* Welcome to a simple robot car program *")
print("*********************************************")
""" 移動平均フィルタを実装しよう."""
def maFilter(self, new_value):
"""
ここに移動平均フィルタのコードを書く
"""
return new_value
""" ステアリングの制御: wheel_angleが正だと右折,負だと左折 """
def control(self, steering_angle):
LIMIT_ANGLE = 0.5 # ステアリング角の限界 [rad]
if steering_angle > LIMIT_ANGLE:
steering_angle = LIMIT_ANGLE
elif steering_angle < -LIMIT_ANGLE:
steering_angle = -LIMIT_ANGLE
self.driver.setSteeringAngle(steering_angle)
""" 画素と黄色の差の平均を計算 """
def colorDiff(self, pixel, yellow):
d, diff = 0, 0
for i in range (0,3):
d = abs(pixel[i] - yellow[i])
diff += d
return diff/3
""" 黄色ラインを追従するための操舵角の計算 """
def calcSteeringAngle(self,image):
YELLOW = [95, 187, 203] # 黄色の値 (BGR フォーマット)
sumx = 0 # 黄色ピクセルのX座標の和
pixel_count = 0 # 黄色の総ピクセル数
for y in range(int(1.0*self.camera_height/3.0),self.camera_height):
for x in range(0,self.camera_width):
if self.colorDiff(image[y,x], YELLOW) < 30: # 黄色の範囲
sumx += x # 黄色ピクセルのx座標の和
pixel_count += 1 # 黄色ピクセル数の和
# 黄色ピクセルを検出できない時は no pixels was detected...
if pixel_count == 0:
return self.UNKNOWN
else:
y_ave = float(sumx) /(pixel_count * self.camera_width)
steer_angle = (y_ave - 0.5) * self.camera_fov
# print("dev=%g y_ave=%g sumx=%d pixel_count=%d" % (dev, y_ave, sumx, pixel_count))
return steer_angle
""" 障害物の方位と距離を返す. 障害物を発見できないときはUNKNOWNを返す.
ロボットカー正面の矩形領域に障害物がある検出する
"""
def calcObstacleAngleDist(self, lidar_data):
OBSTACLE_HALF_ANGLE = 20.0 # 障害物検出の角度.中央の左右20[°].
OBSTACLE_DIST_MAX = 20.0 # 障害物検出の最大距離[m]
OBSTACLE_MARGIN = 0.1 # 障害物回避時の横方向の余裕[m]
sumx = 0
collision_count = 0
obstacle_dist = 0.0
for i in range(int(self.lidar_width/2 - OBSTACLE_HALF_ANGLE), \
int(self.lidar_width/2 + OBSTACLE_HALF_ANGLE)):
dist = lidar_data[i]
if dist < OBSTACLE_DIST_MAX: sumx += i collision_count += 1 obstacle_dist += dist if collision_count == 0 or obstacle_dist > collision_count * OBSTACLE_DIST_MAX: # 障害物を検出できない場合
return self.UNKNOWN, self.UNKNOWN
else:
obstacle_angle = (float(sumx) /(collision_count * self.lidar_width) - 0.5) * self.lidar_fov
obstacle_dist = obstacle_dist/collision_count
if abs(obstacle_dist * math.sin(obstacle_angle)) < 0.5 * self.CAR_WIDTH + OBSTACLE_MARGIN:
return obstacle_angle, obstacle_dist # 衝突するとき
else:
return self.UNKNOWN, self.UNKNOWN
""" 実行 """
def run(self):
stop = False
step = 0
while self.driver.step() != -1:
step +=1
BASIC_TIME_STEP = 10 # シミュレーションの更新は10[ms]
if stop == True:
print("Stop!")
#self.driver.setBrakeIntensity(1.0) # ブレーキをかける.
self.driver.setCruisingSpeed(0) # 非常停止
# センサの更新をTIME_STEP[ms]にする.この例では60[ms]
if step % int(self.TIME_STEP / BASIC_TIME_STEP) == 0:
# Liar
lidar_data = self.lidar.getRangeImage()
# GPS
values = self.gps.getValues()
# Camera
camera_image = self.camera.getImage()
# OpenCVのPythonは画像をnumpy配列で扱うので変換する.
cv_image = np.frombuffer(camera_image, np.uint8).reshape((self.camera_height, self.camera_width, 4))
# 障害物回避
obstacle_angle, obstacle_dist = self.calcObstacleAngleDist(lidar_data)
STOP_DIST = 5 # 停止距離[m]
if obstacle_dist < STOP_DIST:
print("%d:Find obstacles(angle=%g, dist=%g)" % \
(step, obstacle_angle, obstacle_dist))
stop = True
else:
# 操作量(ステアリング角度)の計算
steering_angle = self.maFilter(self.calcSteeringAngle(cv_image))
if steering_angle != self.UNKNOWN:
print("%d:Find the yellow line" % step)
self.driver.setCruisingSpeed(self.SPEED) # 走行速度の設定
self.control(steering_angle) # ステアリングの制御(比例制御の簡易版)
stop = False
else:
print("%d:Lost the yellow line" % step)
self.driver.setCruisingSpeed(0) # 追従する黄色線をロストしたので停止する.
# self.driver.setBrakeIntensity(0.5) # 追従する黄色線をロストしたので停止する.
stop = True
""" メイン関数 """
def main():
robot_car = RobotCar()
robot_car.run()
""" このスクリプトをモジュールとして使うための表記 """
if __name__ == '__main__':
main()
ハンズオン
終わり

このページは金沢工業大学大学院機械工学専攻ロボット知能工学特論のサポートページです。第12週はWebotsの自動運転シミュレータに,カメラを使いコース中央にある黄色ラインを追従する制御プログラムとLIDARを使った障害物回避を実装します.
レファレンス
ハンズオン
終わり

Webots講座の8回目です.今までWebots入門講座という名称でしたが,今後発展的な内容も増えてくると思うのでWebots講座に変更しました.さて,引き続きWebotsの自動運転シミュレータを使っていきます.今回はキーボードによるマニュアル操作を導入します.これでゲームのように車を操作できますね.
レファレンス
キーボードの使い方
API
サンプルコード
"""robot_car controller."""
import cv2
import math
import numpy as np
from vehicle import Driver
from controller import GPS, Node
from controller import Keyboard
""" ロボットカークラス """
class RobotCar():
CRUSING_SPEED = 20 # 巡行速度[km/h]
MAX_SPEED = 250 # 最大速度[km/h]
LIMIT_STEERING_ANGLE = 0.5 # 操舵角の最大値[rad]
UNKNOWN = 99999.99 # 黄色ラインを検出できない時の値
FILTER_SIZE = 3 # 黄色ライン用のフィルタ
TIME_STEP = 30 # センサのサンプリング時間[ms]
CAR_WIDTH = 2.015 # 車幅[m]
CAR_LENGTH = 5.0 # 車長[m]
DEBUG = False # デバッグ用の情報表示
""" コンストラクタ """
def __init__(self):
# Welcome message
self.welcomeMessage()
self.cmd_speed = self.CRUSING_SPEED # 速度指令値
self.cmd_steering_angle = 0 # 操舵角指令地
# Driver
self.driver = Driver()
self.driver.setSteeringAngle(self.cmd_steering_angle)
self.driver.setCruisingSpeed(self.cmd_speed)
self.driver.setDippedBeams(True) # ヘッドライト転倒
# LIDAR (SICK LMS 291)
self.lidar = self.driver.getDevice("Sick LMS 291")
self.lidar.enable(self.TIME_STEP)
self.lidar_width = self.lidar.getHorizontalResolution()
self.lidar_range = self.lidar.getMaxRange()
self.lidar_fov = self.lidar.getFov();
# GPS
self.gps = self.driver.getDevice("gps")
self.gps.enable(self.TIME_STEP)
# Camera
self.camera = self.driver.getDevice("camera")
self.camera.enable(self.TIME_STEP)
self.camera_width = self.camera.getWidth()
self.camera_height = self.camera.getHeight()
self.camera_fov = self.camera.getFov()
print("camera: width=%d height=%d fov=%g" % \
(self.camera_width, self.camera_height, self.camera_fov))
# Display
self.display = self.driver.getDevice("display")
self.display.attachCamera(self.camera) # show camera image
self.display.setColor(0xFFFFFF)
self.display.setFont('Arial', 12, True)
# Keyboard
self.keyboard = Keyboard()
# Steer Angle
self.manual_steering = 0.0
# sdrive
self.auto_drive = True
""" ウエルカムメッセージ """
def welcomeMessage(self):
print("*********************************************")
print("* Welcome to a simple robot car program *")
print("*********************************************")
print("*** Auto Drive Mode ***")
print("Input [A] key to Auto Drive Mode")
""" 移動平均フィルタを実装しよう."""
def maFilter(self, new_value):
"""
ここに移動平均フィルタのコードを書く
"""
return new_value
""" ステアリングの制御: wheel_angleが正だと右折,負だと左折 """
def control(self, steering_angle):
# ここにPID制御などをコーディングする.
return steering_angle
""" 画素と黄色の差の平均を計算 """
def colorDiff(self, pixel, yellow):
d, diff = 0, 0
for i in range (0,3):
d = abs(pixel[i] - yellow[i])
diff += d
return diff/3
""" 黄色ラインを追従するための操舵角の計算 """
def calcSteeringAngle(self,image):
YELLOW = [95, 187, 203] # 黄色の値 (BGR フォーマット)
sumx = 0 # 黄色ピクセルのX座標の和
pixel_count = 0 # 黄色の総ピクセル数
for y in range(int(1.0*self.camera_height/3.0),self.camera_height):
for x in range(0,self.camera_width):
if self.colorDiff(image[y,x], YELLOW) < 30: # 黄色の範囲
sumx += x # 黄色ピクセルのx座標の和
pixel_count += 1 # 黄色ピクセル数の和
# 黄色ピクセルを検出できない時は no pixels was detected...
if pixel_count == 0:
return self.UNKNOWN
else:
y_ave = float(sumx) /(pixel_count * self.camera_width)
steer_angle = (y_ave - 0.5) * self.camera_fov
# print("dev=%g y_ave=%g sumx=%d pixel_count=%d" % (dev, y_ave, sumx, pixel_count))
return steer_angle
""" 障害物の方位と距離を返す. 障害物を発見できないときはUNKNOWNを返す.
ロボットカー正面の矩形領域に障害物がある検出する
"""
def calcObstacleAngleDist(self, lidar_data):
OBSTACLE_HALF_ANGLE = 20.0 # 障害物検出の角度.中央の左右20[°].
OBSTACLE_DIST_MAX = 20.0 # 障害物検出の最大距離[m]
OBSTACLE_MARGIN = 0.1 # 障害物回避時の横方向の余裕[m]
sumx = 0
collision_count = 0
obstacle_dist = 0.0
for i in range(int(self.lidar_width/2 - OBSTACLE_HALF_ANGLE), \
int(self.lidar_width/2 + OBSTACLE_HALF_ANGLE)):
dist = lidar_data[i]
if dist < OBSTACLE_DIST_MAX:
sumx += i
collision_count += 1
obstacle_dist += dist
if collision_count == 0 or obstacle_dist > collision_count * OBSTACLE_DIST_MAX: # 障害物を検出できない場合
return self.UNKNOWN, self.UNKNOWN
else:
obstacle_angle = (float(sumx) /(collision_count * self.lidar_width) - 0.5) * self.lidar_fov
obstacle_dist = obstacle_dist/collision_count
if abs(obstacle_dist * math.sin(obstacle_angle)) < 0.5 * self.CAR_WIDTH + OBSTACLE_MARGIN:
return obstacle_angle, obstacle_dist # 衝突するとき
else:
return self.UNKNOWN, self.UNKNOWN
""" 速度の設定 """
def setSpeed(self, speed):
if speed > self.MAX_SPEED: # [km/h]
speed = self.MAX_SPEED
elif speed < - self.MAX_SPEED:
speed = -self.MAX_SPEED
self.driver.setCruisingSpeed(speed)
""" ステアリング角度の手動変更 """
def setSteeringAngle(self, angle):
if self.auto_drive == False:
print("*** Manual Drive Mode ***")
print("Input [A] key to Auto-Drive Mode")
if angle > self.LIMIT_STEERING_ANGLE: # [rad]
angle = self.LIMIT_STEERING_ANGLE
elif angle < -self.LIMIT_STEERING_ANGLE:
angle = - self.LIMIT_STEERING_ANGLE
self.driver.setSteeringAngle(angle)
""" キーボードの入力チェック """
def checkKeyboard(self):
key = self.keyboard.getKey()
if key == self.keyboard.UP:
#print("UP key is pushed")
self.cmd_speed += 5.0
elif key == self.keyboard.DOWN:
#print("DOWN key is pushed")
self.cmd_speed -= 5.0
elif key == self.keyboard.RIGHT:
#print("Right key is pushed")
self.auto_drive = False
self.cmd_steering_angle += math.pi/ 180.0 # 1[deg]をradianに変換
elif key == self.keyboard.LEFT:
#print("LEFT key is pushed")
self.auto_drive = False
self.cmd_steering_angle -= math.pi/ 180.0
elif key == ord('A') or key == ord('a'): # ord関数は文字のUnicode値を返す
self.auto_drive = True
#print("A/a key is pushed")
print("*** Auto Drive Msode ***")
elif key == ord('S') or key == ord('s'): # ord関数は文字のUnicode値を返す
self.auto_drive = False
#print("S/s key is pushed ")
self.cmd_speed = 0
""" 描画更新 """
def updateDisplay(self): # 3Dシミュレーションウインドウに文字を表示
gps_speed = self.gps.getSpeed()* 3.6 # [km\h]
if gps_speed > self.MAX_SPEED:
return
self.display.setColor(0x000000)
self.display.fillRectangle(10,10, 90,20)
txt = "%.1f [km/h]" % float(self.gps.getSpeed()* 3.6)
# print(txt)
self.display.setColor(0xFFFFFF)
self.display.drawText(txt, 18, 15)
""" 実行 """
def run(self):
step = 0
# キーボー入力の有効化
self.keyboard.enable(self.TIME_STEP)
# main loop
while self.driver.step() != -1:
step +=1
BASIC_TIME_STEP = 10 # シミュレーションの更新は10[ms]
# センサの更新をTIME_STEP[ms]にする.この例では60[ms]
if step % int(self.TIME_STEP / BASIC_TIME_STEP) == 0:
# キーボード入力
self.checkKeyboard()
# Liar
lidar_data = self.lidar.getRangeImage()
# GPS
values = self.gps.getValues()
# Camera
camera_image = self.camera.getImage()
# OpenCVのPythonは画像をnumpy配列で扱うので変換する.
cv_image = np.frombuffer(camera_image, np.uint8).reshape((self.camera_height, self.camera_width, 4))
# 障害物回避
obstacle_angle, obstacle_dist = self.calcObstacleAngleDist(lidar_data)
STOP_DIST = 5 # 停止距離[m]
if obstacle_dist < STOP_DIST:
if self.DEBUG == True:
print("%d:Find obstacles(angle=%g, dist=%g)" % \
(step, obstacle_angle, obstacle_dist))
self.cmd_speed = 0 # 障害物があるので速度指令値を0に設定
else:
if self.auto_drive == False:
pass
else:
# 操作量(ステアリング角度)の計算
steering_angle = self.maFilter(self.calcSteeringAngle(cv_image))
if steering_angle != self.UNKNOWN:
if self.DEBUG == True:
print("%d:Find the yellow line" % step)
self.cmd_speed = self.CRUSING_SPEED # 速度指令値の設定
self.cmd_steering_angle = self.control(steering_angle) # ステアリングの制御(比例制御の簡易版)
else:
if self.DEBUG == True:
print("%d:Lost the yellow line" % step)
self.cmd_speed = 0 # 追従する黄色線をロストしたので速度指令値を0に設定する.
# self.driver.setBrakeIntensity(0.5) # 追従する黄色線をロストしたので停止する.
# 描画更新
self.updateDisplay()
# 速度指令
self.setSpeed(self.cmd_speed)
# 操舵指令
self.setSteeringAngle(self.cmd_steering_angle)
""" メイン関数 """
def main():
robot_car = RobotCar()
robot_car.run()
""" このスクリプトをモジュールとして使うための表記 """
if __name__ == '__main__':
main()
ハンズオン
終わり

7/17(土),18(日)にKITオープンキャンパスが開催されます.ロボティクス学科のブースでは出村研究室が協働型ロボットSawyerを使い未来のコンビニをテーマとしたFuture Convenience Store Challenge(FCSC)のデモを行います.事前申込された方は是非,見に来てください.詳細は次のリンクをご覧ください.なお,新型コロナ対策のため予約制になっており新規受付は終了しています.
お待ちしています.
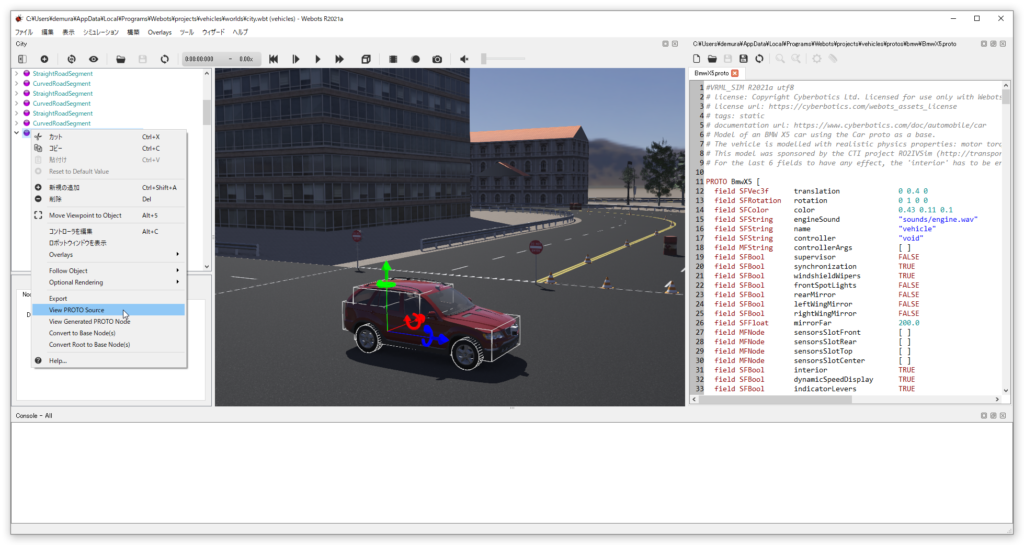
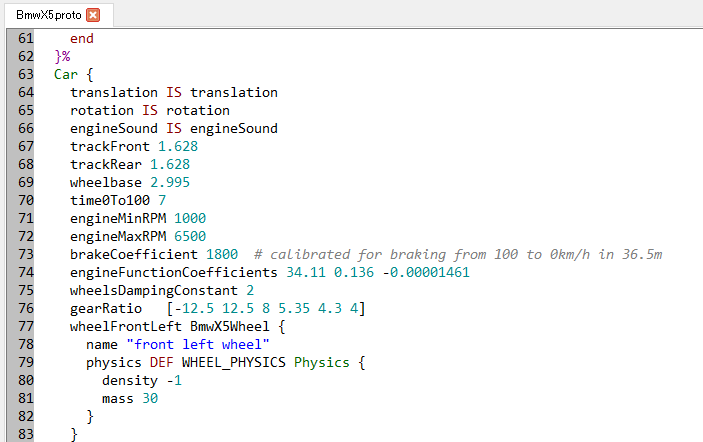
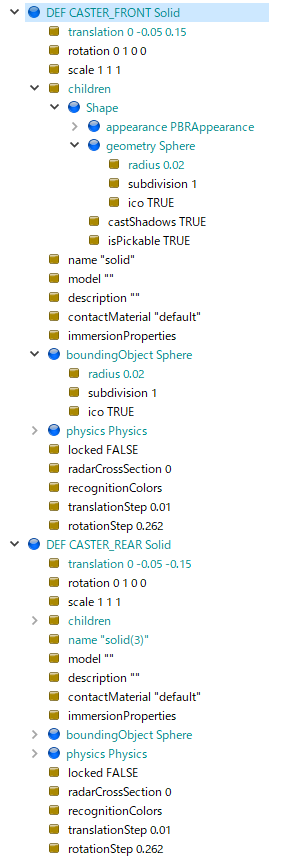
Webots講座の9回目です.Webots講座4:自分の位置を知ろう(Python)でデッドレコニングを実装するハンズオンがありました.デッドレコニングを実装するには,そのロボットのホイールベースなどのパラメータがわらないと実装できません.WebotsではPROTOという仕組みがあり,そのPROTOファイルにロボットのパラメータが書かれています.では,引き続き自動運転シミュレータで使ってきたロボットカーBMW X5のPROTOファイルを見てみましょう.
レファレンス
PROTOファイル
trackFront/trackRear: フロント/リアの左右の車輪間隔wheelbase: ホイールベース.フロントとリア軸間の距離minSteeringAngle/maxSteeringAngle: フロント車輪の最少/最大操舵角suspension...: サスペンション諸元の定義wheelsDampingConstant: 各車輪ジョイントのdampingConstant(減衰定数).車の摩擦のシミュレーション計算に使われる.maxSteeringTorque: フロントホイールのy軸にかかる最大トルクextensionSlot: センサや車の形状などの他ノードを追加boundingObject: 車の物理ジオメトリ.なお,物理ジオメトリは衝突の対象となる物体の属性.physics: 車の物理パラメータradarCrossSection: レーダ反射断面積.0以上の場合,レーダセンサに検出される可能性がある.recognitionColors: 空欄でなければ,カメラセンサにより認識される可能性がある.wheelX: VehicleWheel を追加するスロットaxisDevicesX: 車輪ジョイントにBrake, PositionSensor,Motorなどのデバイスを追加するスロットdata: Robot ノードのユーザ定義データ(文字列)ハンズオン
終わり

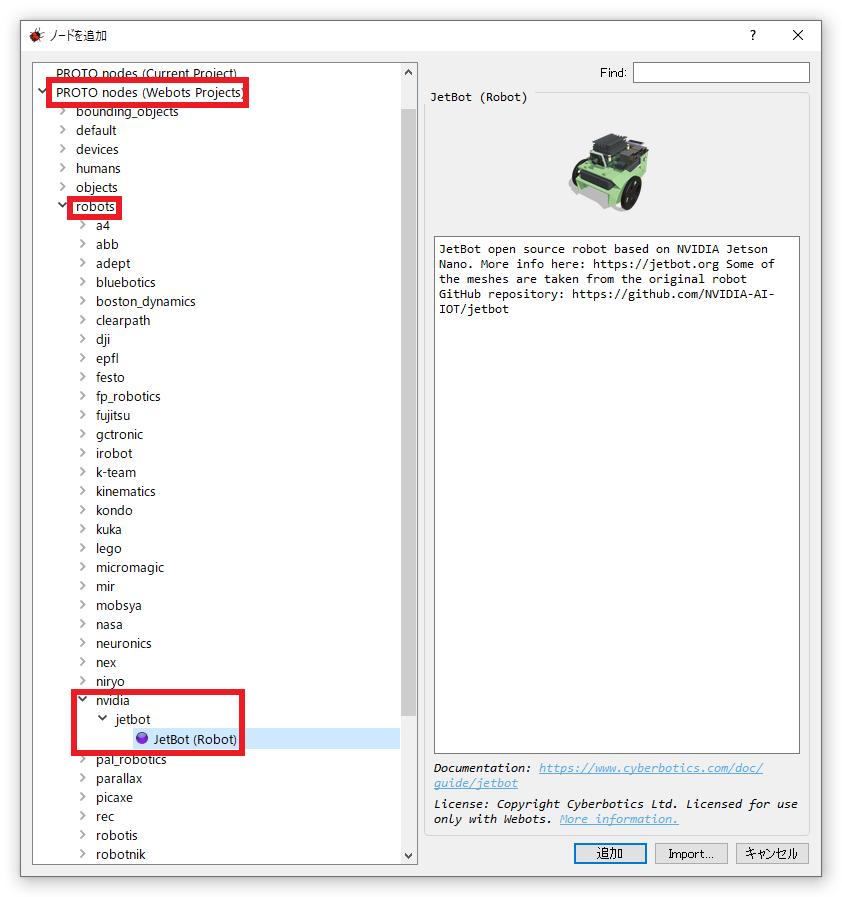
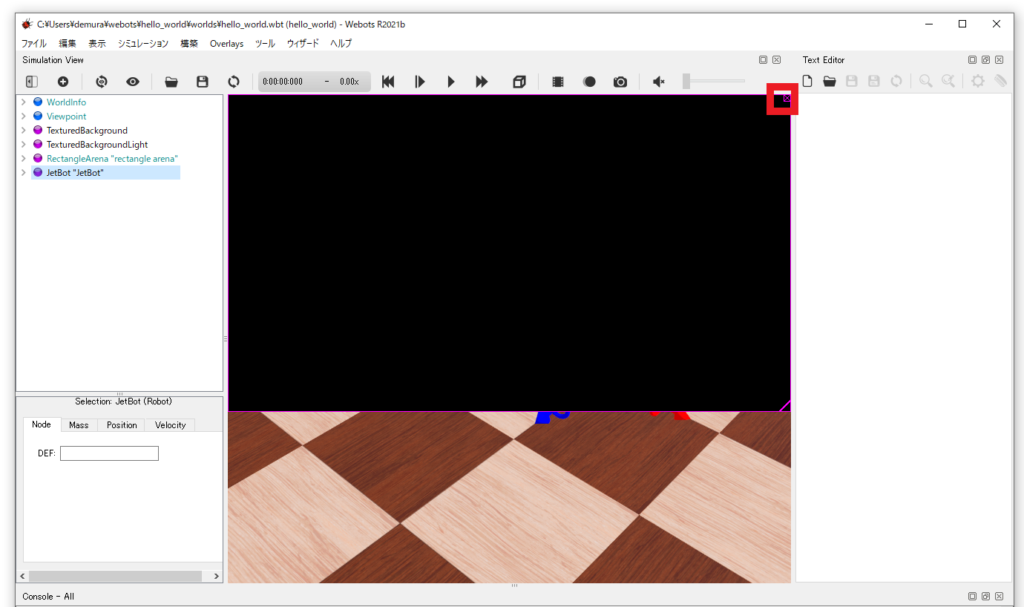
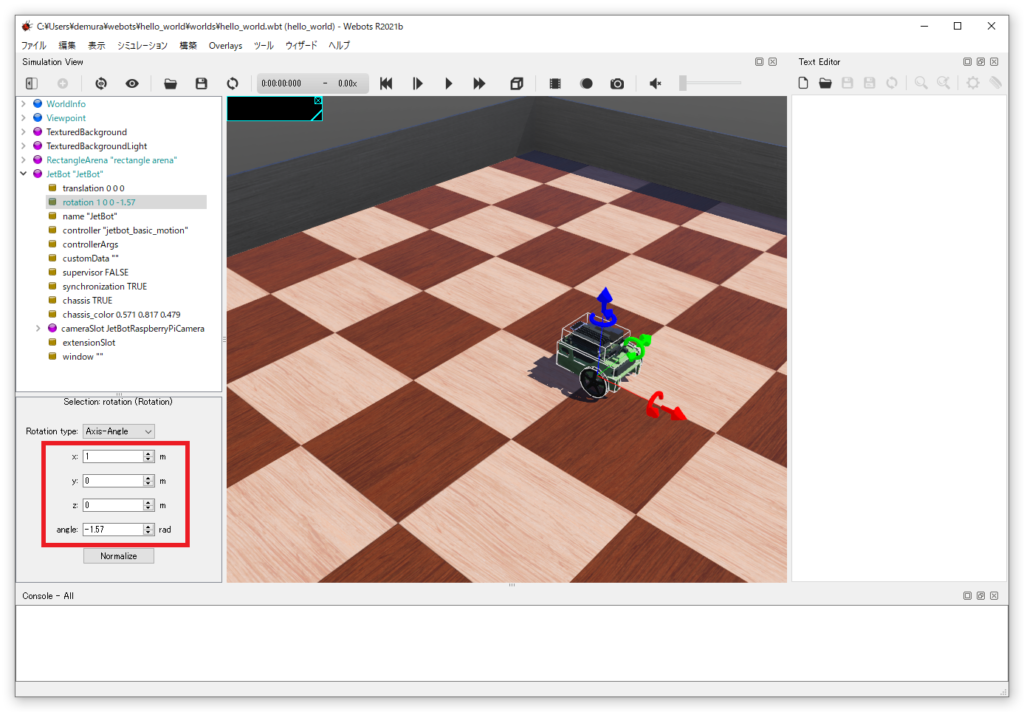
Webotsが約7か月ぶりに2021bにバージョンアップしました.結構変わっているので開発が盛んなんですね.詳細は次のリンクをご覧ください.なお,上の図は新しく追加されたNVIDIAのJetbot.
終わり
KIT夏のオープンキャンパスが2021年7月17,18日に開催されました.ロボティクス学科出村研究室ブースではRethink Robotics社の協働型ロボットSawyerを使ったコンビニタスクのデモを実施しました.その説明動画(2:55)です.よく見るとSawyerは関節に直列にバネが入っているので動作を停止しても多少動いているのがわかります.関節が柔らかいので,その特性を生かしてハメ合い作業などを簡単に実現できます.なお,ハンドは研究室で開発しました.
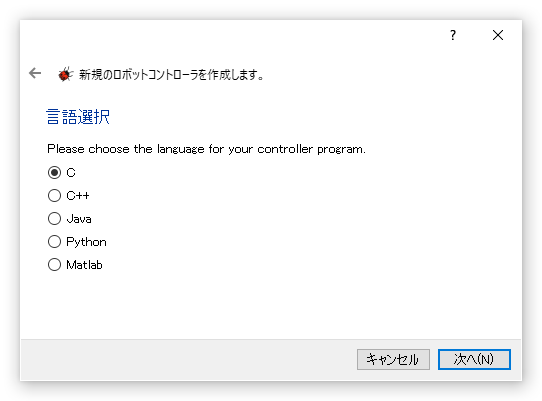
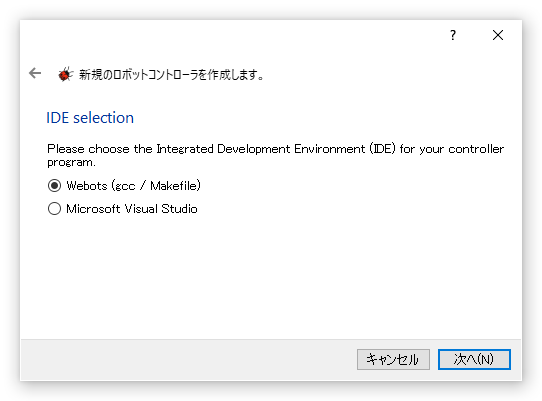
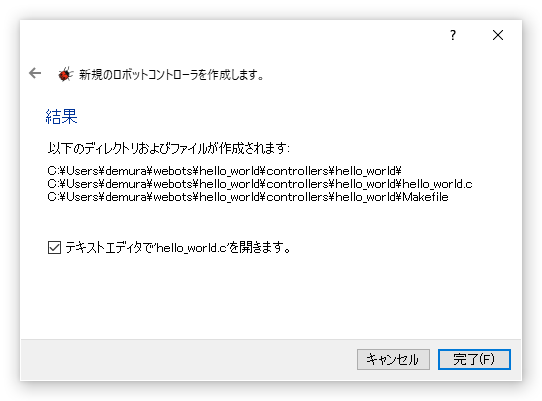
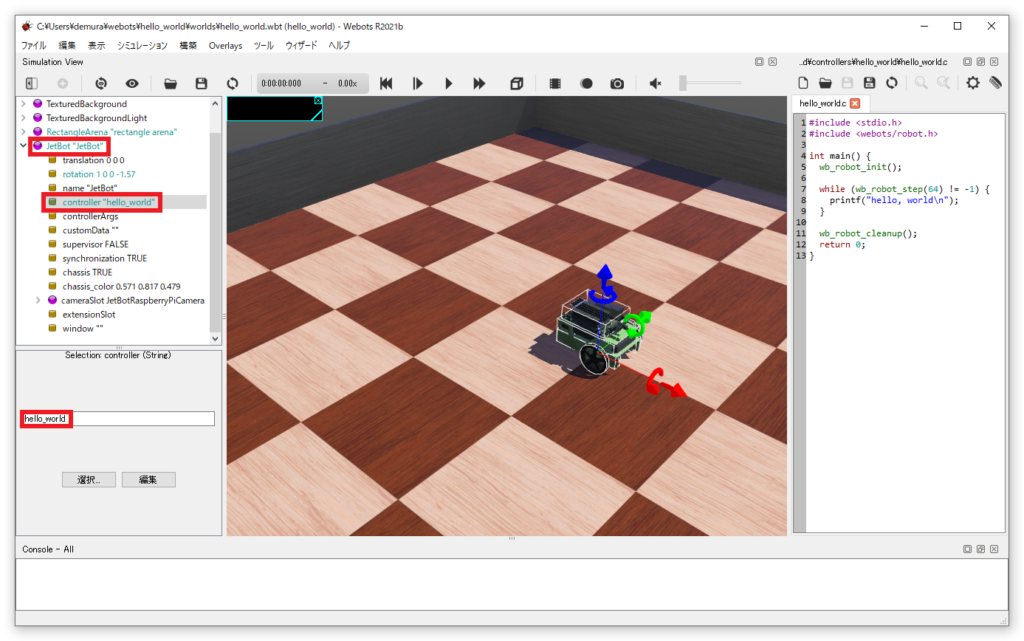
Webots講座の10回目です.今までPythonを使っていましたが,C言語でプログラミングしてみましょう.
レファレンス
環 境
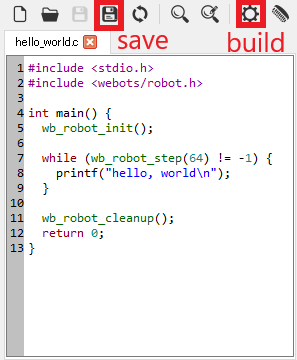
はじめてのWebotsプログラミング
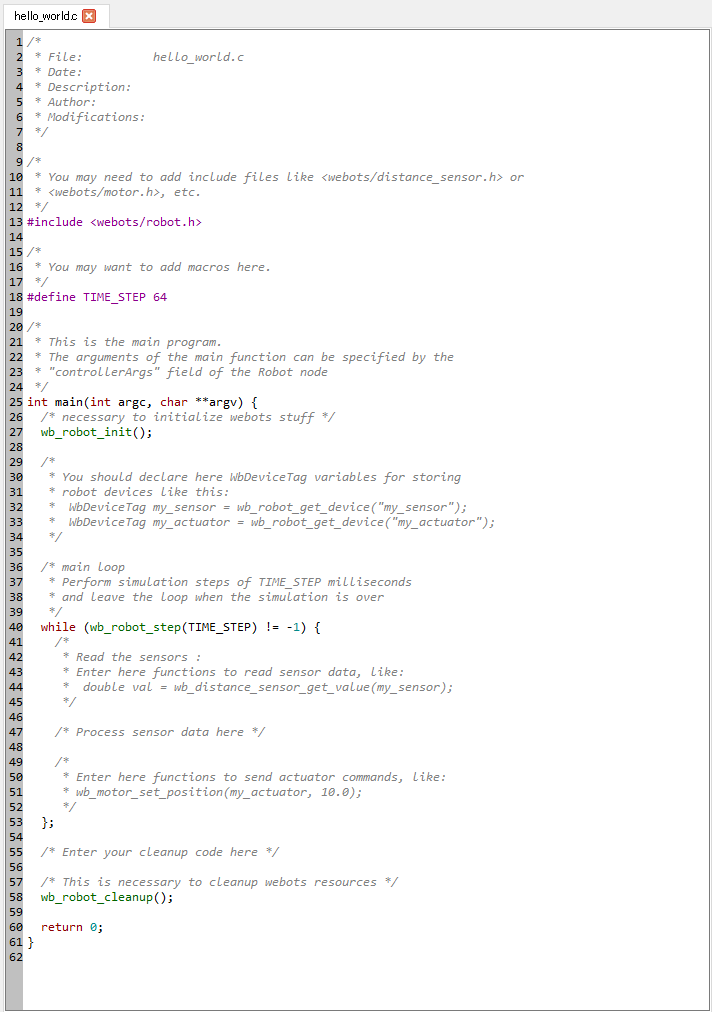
#include <stdio.h>
#include <webots/robot.h>
int main(int argc, char **argv) {
wb_robot_init();
while (wb_robot_step(64) != -1) {
printf("hello, world\n");
}
wb_robot_cleanup();
return 0;
}
ソースコードを説明します.1行目で標準入出力用のヘッダファイル,2行目でWebotsに必要なヘッダファイルをインクルードします.5行目でWebotsを初期化し,11行目で終了処理をしています.7行目のwb_robot_step(64)はシミュレータのタイムステップを表し,1ループで64[ms]シミュレーションを進めるという意味です.この時間を小さくすると計算精度は高くなりますが,シミュレーションは遅くなります.逆に大きくするとシミュレーションは速くなりますが,精度が悪くなり,シミュレータと実世界でのロボットの動きが変わってしまいます.このコントローラはロボットを動かすのではなく,シミュレータが終わるまで,”hello, world”とコンソールに出力し続けるだけです.

ハンズオン
終わり

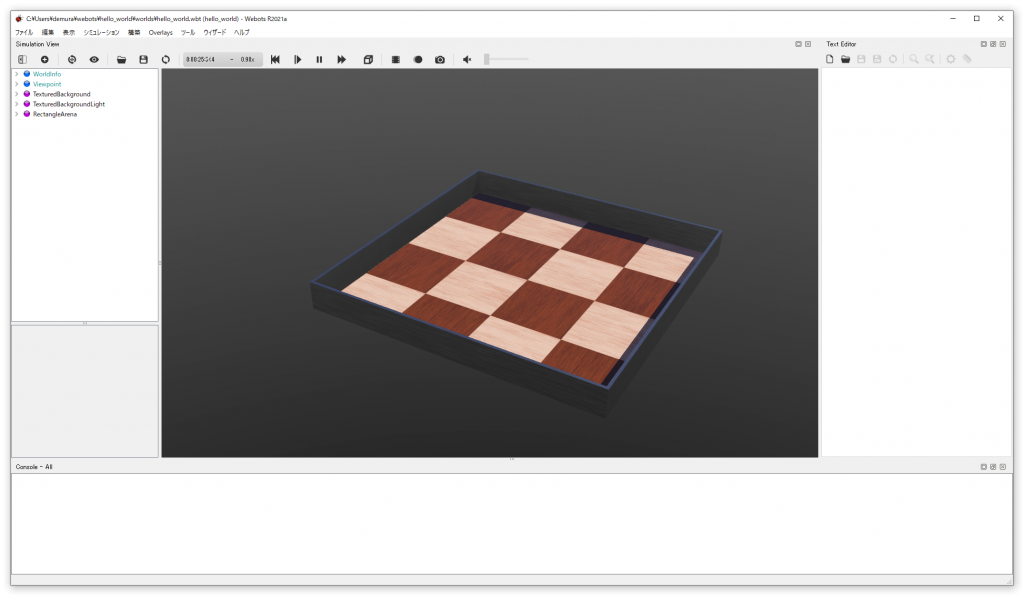
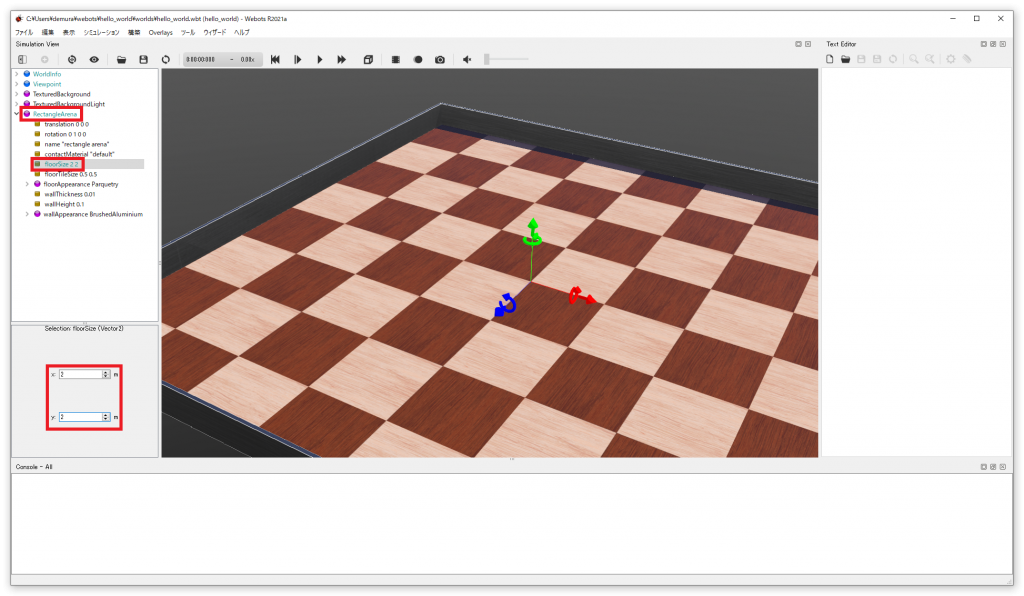
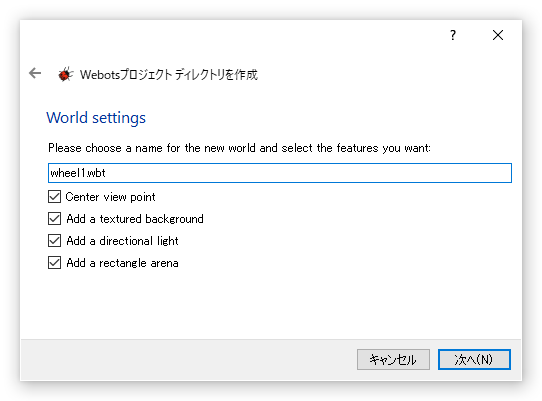
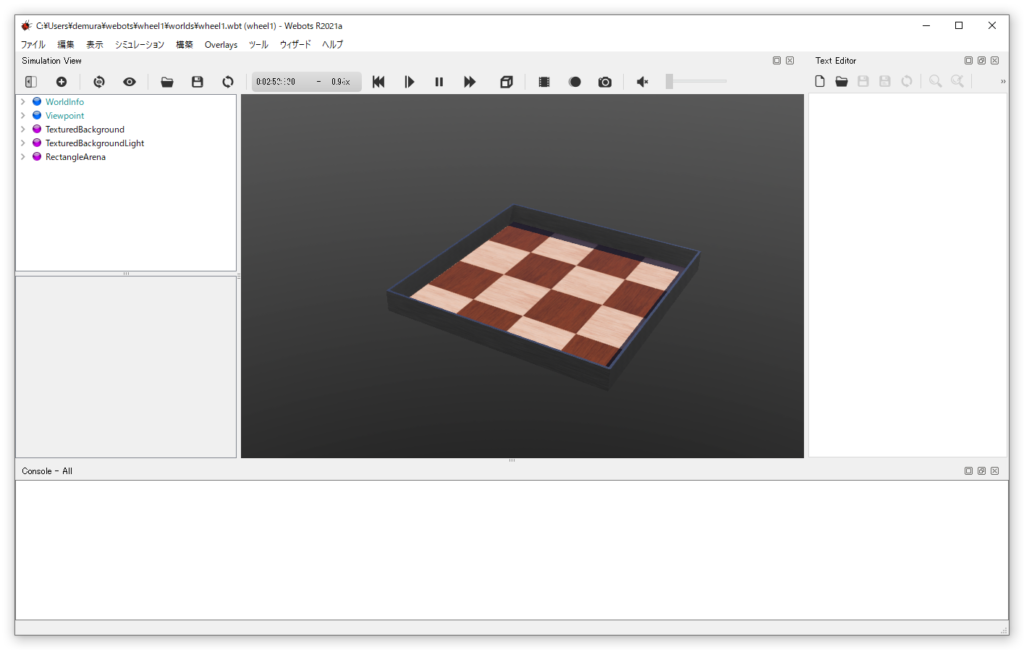
Webots講座9までは自動運転シミュレータを使い,予め作られたロボットカー(BMW X5)にプログラミングしてきました.Webots講座11からは自作ロボットの作り方を学んでいきましょう.本記事はレファレンスのWebots User Guide Tutorial 6を参考に制作しました.作るロボットは自律移動ロボットでは定番の左右駆動輪の速度差によって進行方向が変わる差動駆動型ロボットです.ロボットの前後にキャスターとして球を本体に埋め込んでいます.
なお,Webotsのデフォルトの座標系はロボットの進行方向がz軸:青,左手方向がx軸:赤,上方向がz軸:緑となっています.
レファレンス
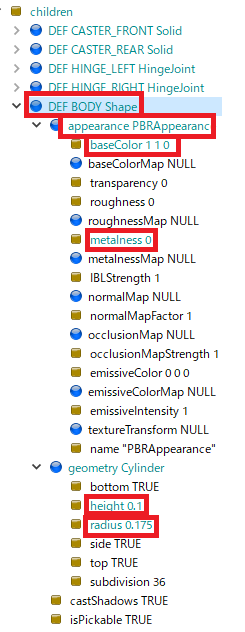
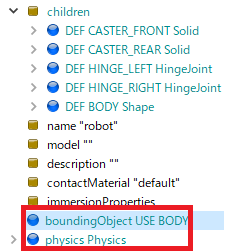
ロボットの仕様
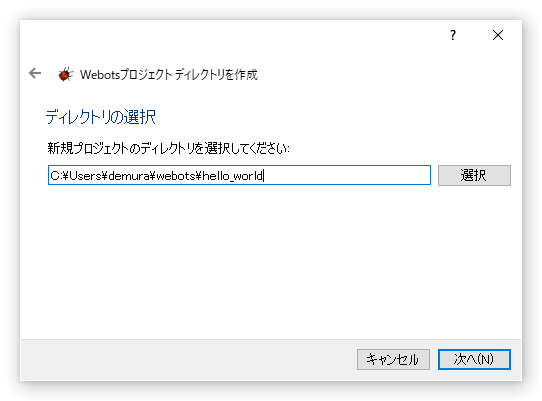
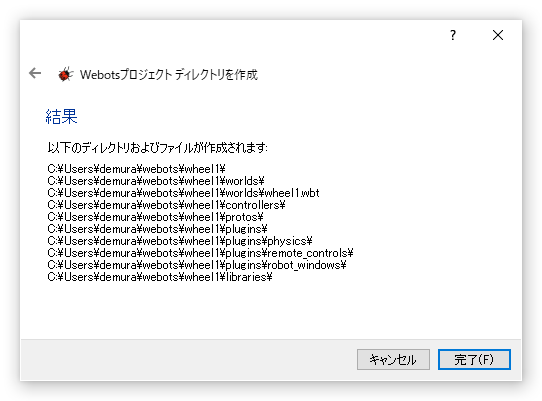
プロジェクトの作成
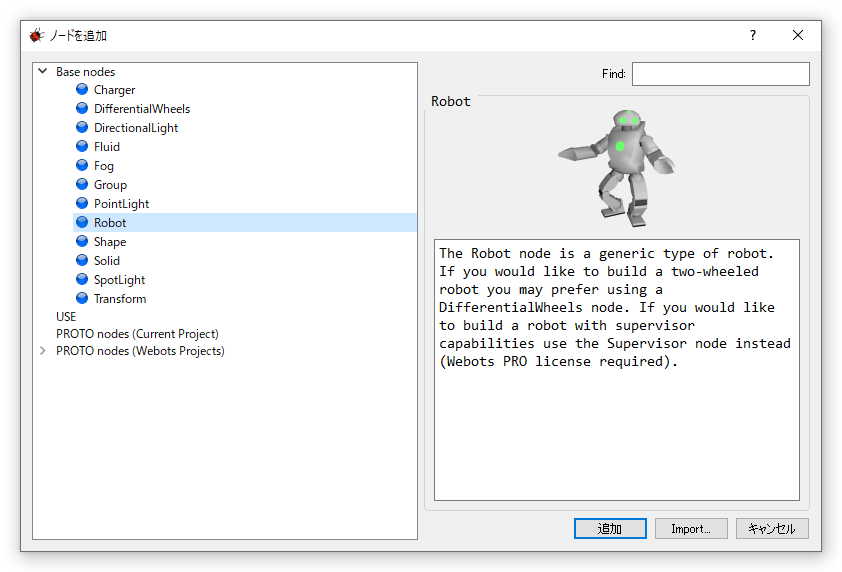
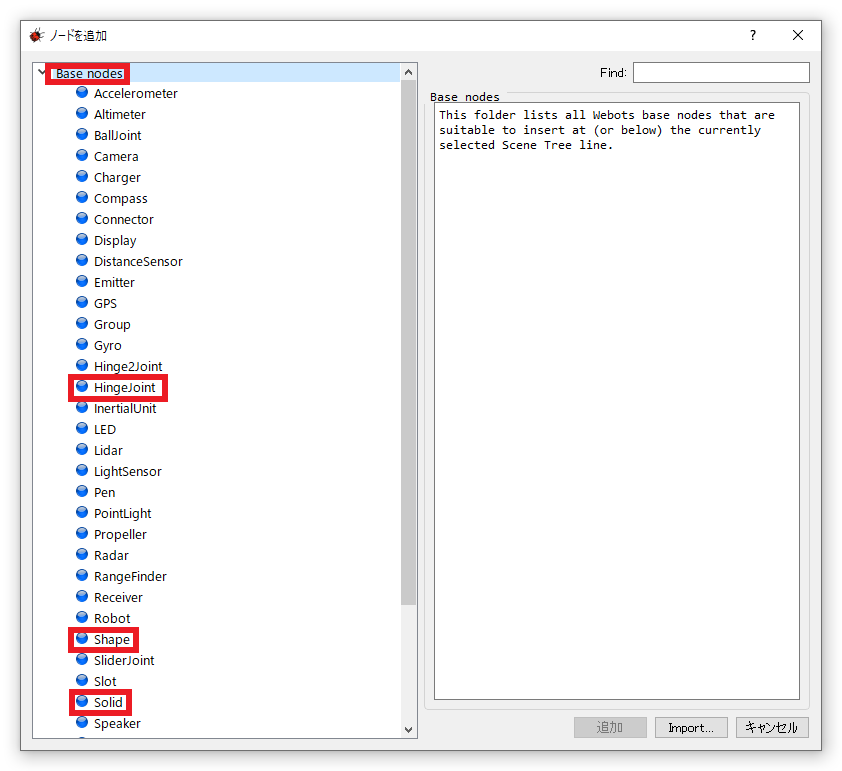
Robotノードの追加
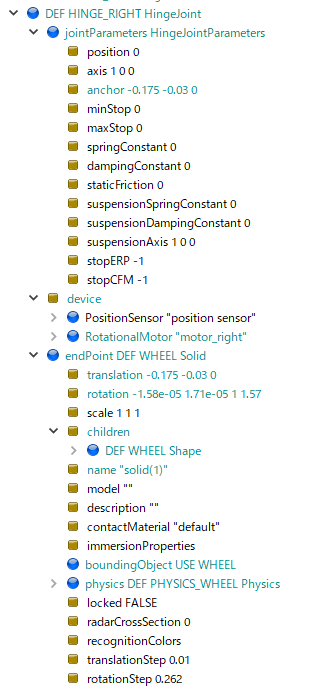
コントローラの作成
/* wheel1.c */
#include
#include <webots/motor.h>
#include <webots/robot.h>
/* main関数 */
int main() {
WbDeviceTag motor_left, motor_right; /* デバイスの宣言 */
wb_robot_init(); /* webotsの初期化 */
motor_left = wb_robot_get_device("motor_left"); /* デバイスの取得 */
motor_right = wb_robot_get_device("motor_right");
wb_motor_set_position(motor_left, INFINITY); /* モータ位置の設定 */
wb_motor_set_position(motor_right, INFINITY); /* 速度制御時はINFINITYに設定 */
while (wb_robot_step(64) != -1) {
wb_motor_set_velocity(motor_left, 3.0); /* 回転速度の設定 [rad/s] */
wb_motor_set_velocity(motor_right, 5.0);
}
wb_robot_cleanup(); /* webotsの終了処理 */
return 0;
}
ロボットへのコントローラ組込み
実 行
ハンズオン
終わり
金沢工業大学ロボティクス学科出村研究室のHappy Robotチームは経済産業所とNEDOが主催する国際ロボット競技会WRS2020フューチャーコンビニエンスストアチャレンジの遠隔部門に参加します.

WRS2020 Junior競技カテゴリーの ホームロボットチャレンジ(リアルサイズ)でYumekobo JuniorチームがRobotics for Happiness賞を受賞しました.おめでとうございます!
なお,Yumekobo Juniorは金沢工業大学ロボティクス学科の教育研究活動の一環で,出村教授がアドバイザーを務めています.今回のYumekobo Juniorチームのメンバーは金沢市立工業高校2年1名,金沢錦丘高校1年2名,金沢二水高校1年1名の生徒4名で,中には小学生からYumekobo Juniorの活動に参加したり,RoboCup Juniorの全国大会に参加した生徒もいます.
長年の活動が結果になったといえるかもしれませんね.おめでとうございます!

WRS2020ジュニア競技カテゴリーホームロボットチャレンジ(リアルサイズ)に出場した金沢工業大学夢考房RoboCup@HomeプロジェクトKIT Happy Robotチームは2位でした.おめでとうござます!
1年生主体のチームなので入学してから約5か月の成果です.コロナ禍で活動が制限される中,あきらめず最後まで努力したのが結果につながったと思います.デモはパーフェクトでした.今後は,英語でのプレゼンに磨きをかければ全てパーフェクトになると思います.1年生主体のチームだけに今後が楽しみです.

本講義では、金沢工業大学基礎実技教育課程の西川教授から強力なサポートを受けてETロボコンをロボティクス学科向けにアレンジしたロボコンをテーマとして、組込みプログラミングの基礎を楽しく学びます。
講義日:木曜日3,4限
$ mkdir /ev3rt$ cd /ev3rt$ tar xvf hrp3.tar.xz$ gem install shell$ cd /ev3rt/hrp3/sdk/workspace$ ls helloev3$ make app=helloev3$ ls参考サイト
この記事はKITロボティクス学科プログラミング言語の授業用です。
ロボティクス学科対象のプログラミング言語(出村担当)ではC言語のエディタとして今年度からVSCodiumを使います。VS CodiumはマイクロソフトのVS Code (Visual Studio Code)を完全オープンソース化したものです。Microsoftのロゴ商標などがありません。それ以外はほぼ同じです。
VS CodeはいろいろなOSで使われとても人気のあるエディタですが、初心者には設定などが結構あり敷居が高いです。そこでVS Codeのポータブル機能を使い予め私が授業用に設定したものをダウンロードしてもらいあとは起動するだけですぐ使えます。なお、この方法は加藤丈和さんのサイトを参考にしました。ありがとうございます。
参考サイト
ダウンロード
インストール
実 行