この記事は私が金沢工業大学ロボティクス学科で担当している2018年度後学期開講の講義ロボットプログラミングⅡ用です。今回はTurtlebot3にデッドレコニングを実装します。
- テンプレートファイル
// ファイル名 my_odom.cpp
#include <ros/ros.h> // rosで必要はヘッダーファイル
#include <geometry_msgs/Twist.h> // ロボットを動かすために必要
#include <nav_msgs/Odometry.h>
#include <tf/transform_broadcaster.h>
#include <tf/transform_datatypes.h>
#include <iostream>
using namespace std;
// コールバック関数。並進、回転速度の表示。
void callbackVel(const geometry_msgs::Twist::ConstPtr& vel) {
cout << "Linear :" << vel->linear.x << endl;
cout << "Angular:" << vel->angular.z << endl;
}
void callbackOdom(const nav_msgs::Odometry::ConstPtr& msg)
{
ROS_INFO("Seq: %d", msg->header.seq);
ROS_INFO("Position (x:%f, y:%f, z:%f)", msg->pose.pose.position.x,msg->pose.pose.position.y, msg->pose.pose.position.z);
tf::Quaternion q(msg->pose.pose.orientation.x, msg->pose.pose.orientation.y, msg->pose.pose.orientation.z, msg->pose.pose.orientation.w);
// tf::Quaternion q(quat.x, quat.y, quat.z, quat.w);
tf::Matrix3x3 m(q);
double roll, pitch, yaw;
m.getRPY(roll, pitch, yaw);
ROS_INFO("Pose (roll:%f, pitch:%f, yaw:%f)", roll, pitch, yaw);
ROS_INFO("Vel (Linear:%f, Angular:%f)", msg->twist.twist.linear.x,msg->twist.twist.angular.z);
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "my_odom");
ros::NodeHandle nh;
//subscriberの作成。トピック/cmd_velを購読する。バッファ数は10。
ros::Subscriber sub = nh.subscribe("/cmd_vel", 10, callbackVel);
ros::Subscriber sub2 = nh.subscribe("/odom", 1000, callbackOdom);
// コールバック関数を繰り返し呼び出す。whileループが必要な場合はspinOnce()を使う。
ros::Rate rate(100);
while (ros::ok()) {
ros::spinOnce();
rate.sleep();
}
return 0;
}
- 以下ファイルをダウンロードして~/catkin_ws/srcの下にコピーする。
- ビルドする
- $ cd ~/catkin_ws/src
- $ tar xvf my_odom.tar
- $ cd ~/catkin_ws
- $ catkin_make
- 実行
- $ rosrun my_odom my_odom
演 習
- 準 備
$ cd$ mkdir downloads- fmt_world.tarダウンロードして~/Downloadsの中に保存。
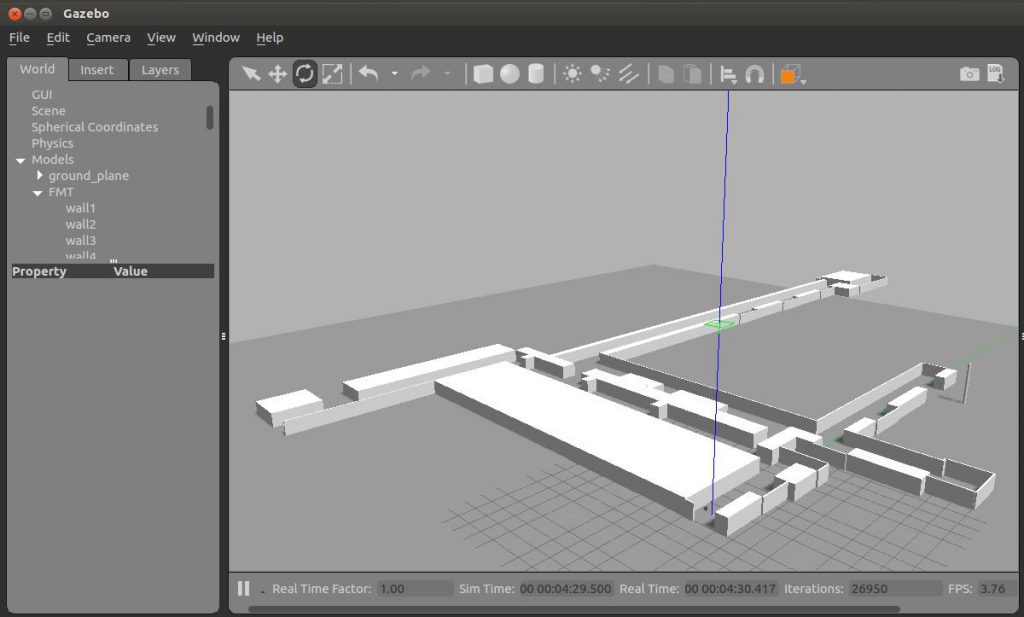
$ cd downloads$ tar xvf fmt_world.tar$ cd fmt_world$ cp turtlebot3_fmt_world.launch ~/catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/launch$ cp fmt.world ~/catkin_ws/src/turtlebot3_simulations/turtlebot3_gazebo/worlds$ cp -r fmt ~/.gazebo/models$ roslaunch turtlebot3_gazebo turtlebot3_fmt_world.launch- 下のような建物とロボットが表示されたら終わり。右奥のボールがゴール。
![]()